
Jeg har eksperimenteret med programmet “blink”, som i alt sin enkelthed tænder og slukker en lysdiode med 1 sekunds mellemrum. Dette er vist “Hello World” programmet for Arduino, og kan anvendes til at verificere at man har fået installeret IDE, compilers og drivere rigtigt. Man får testet hele kæden af fra kodeeditor til kørsel af programmet på enheden, så nu har jeg både en Esp32 og Arduino Nano der blinker…
Jeg har eksperimenteret med forskellige blink, f.eks to hurtige og derefter en længere pause, for at finde ud af hvor let det er at skelne, så man kan anvende forskellige blink to success og fejl.
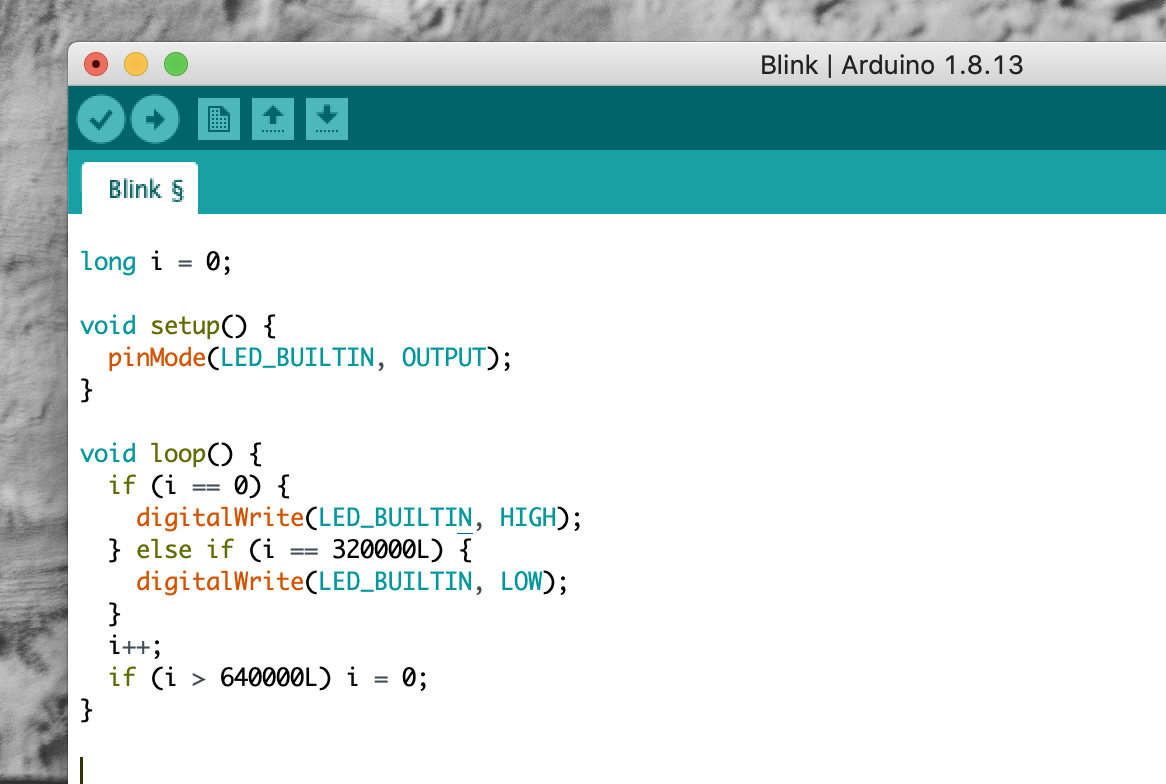
Som man kan se af billedet, har jeg også lavet en non-blocking version af blink uden timer, så jeg kan se hvor meget jeg belaster mit loop. I dette tilfælde er det kun en increment og to if statement, så den når alligevel ca. 32.000 loops i sekundet.
Jeg har også fået oprette git versionskontrol til sourcekoden for Arduino klienterne, så kan udveksle den mellem mine maskiner og ikke mister noget undervejs. Indtil nu har jeg anvendt Arduino IDE både på PC og Mac, men skal på Martins anbefaling også have teste Platform IO.
Jeg er også begyndt at dokumentere den indsamlede information, og som altid giver det anledning til at man finder nogle mangler, så nu har jeg bestilt en logikanalyser til test og dokumentation, samt level shifter der kan sikre master nodens EPS32 på 3.3V mod de 5V TTL signaler der anvendes til RS485 bussen.
